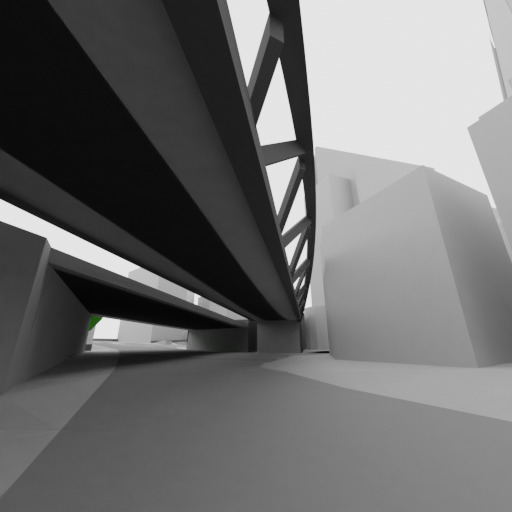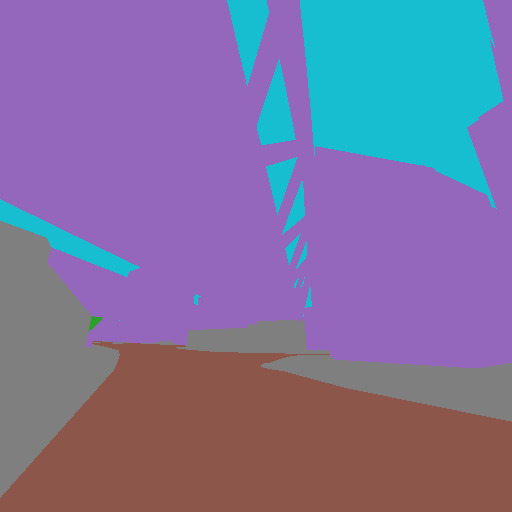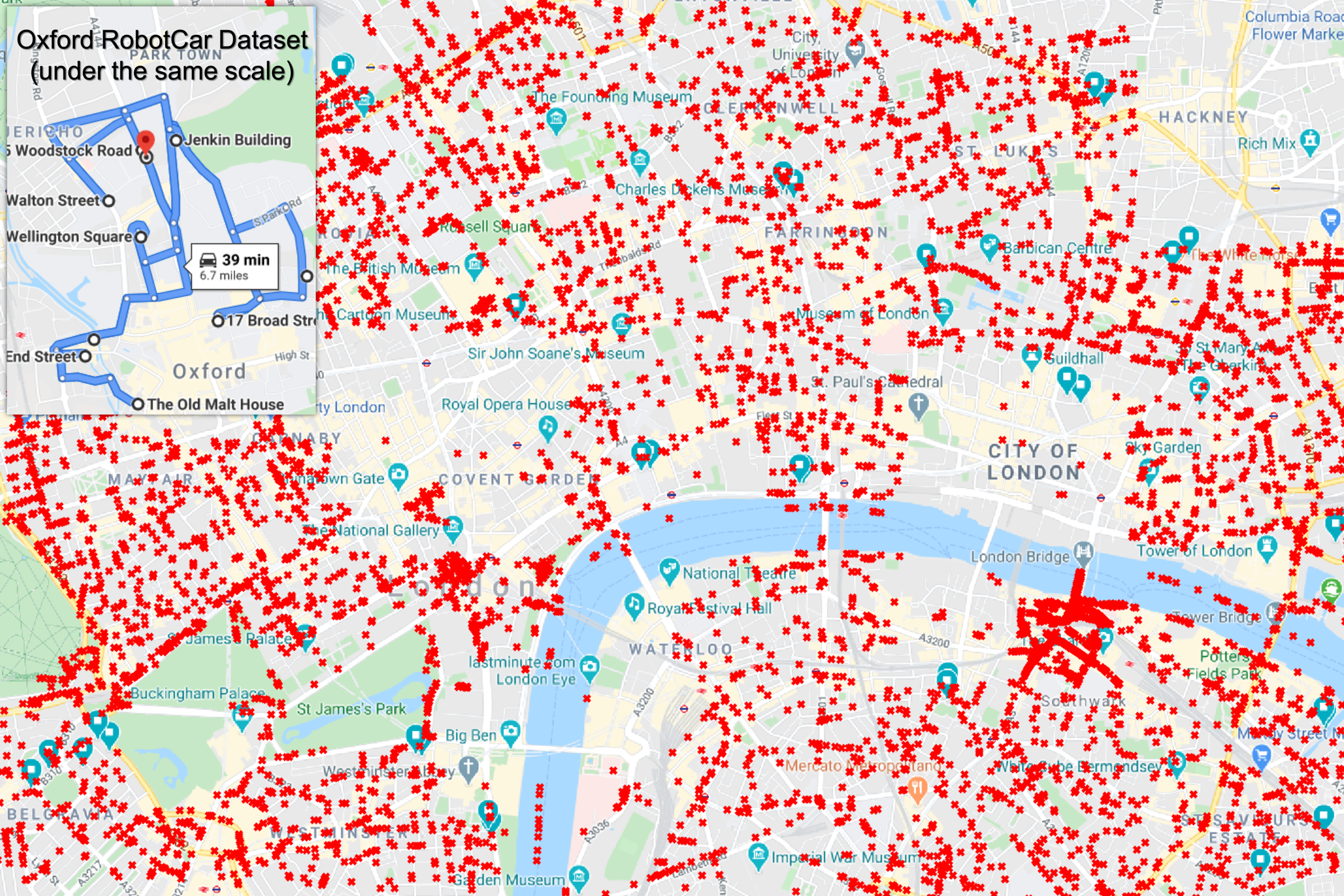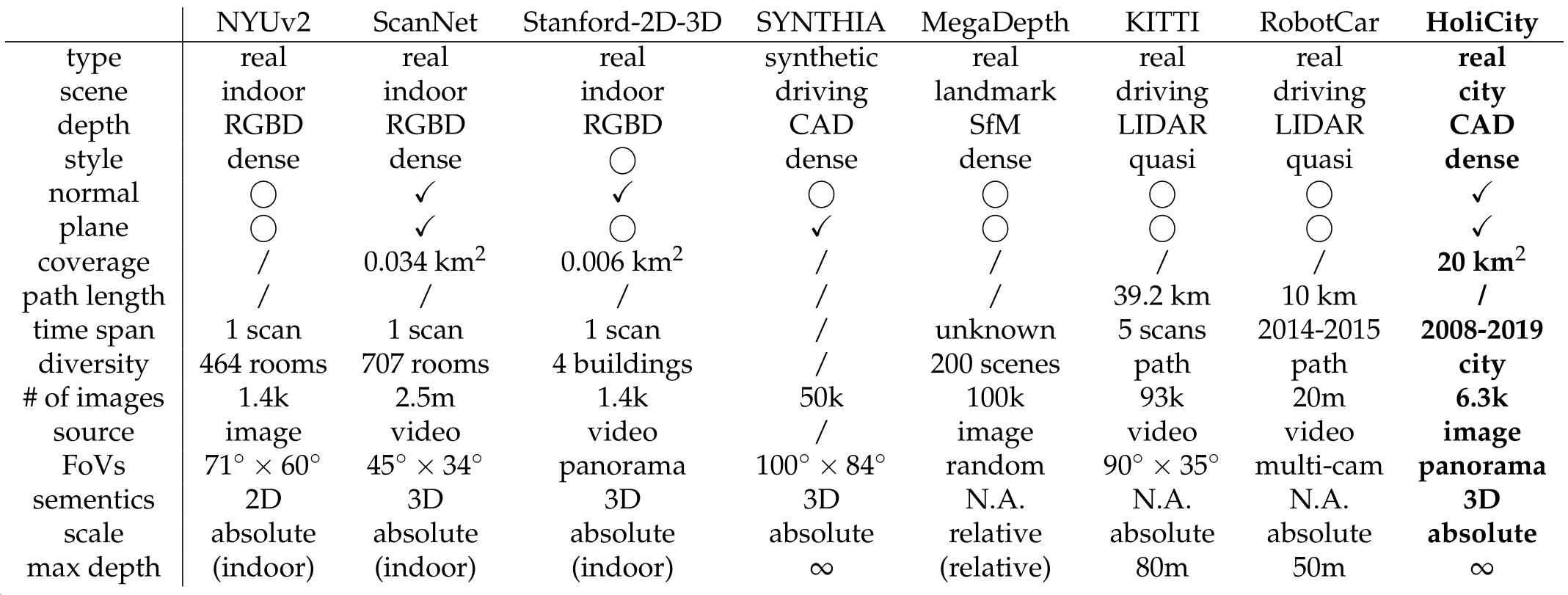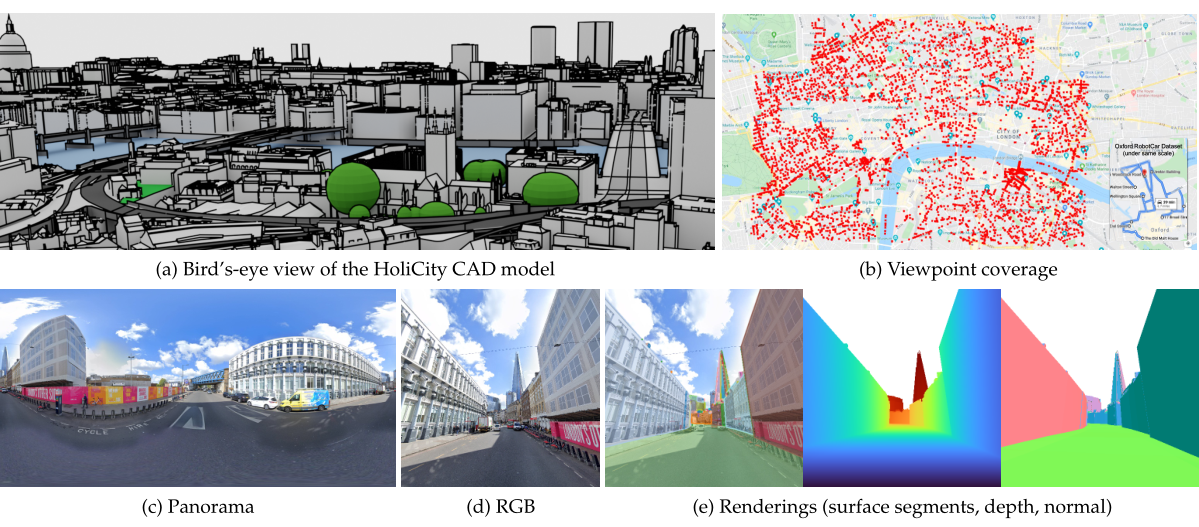
We present HoliCity, a city-scale 3D dataset with rich structural information. Currently, this dataset has 6,300 real-world panoramas of resolution 13312 × 6656 that are accurately aligned with the CAD model of downtown London with an area of more than 20 km2, in which the median reprojection error of the alignment of an average image is less than half a degree. This dataset aims to be an all-in-one data platform for research of learning abstracted high-level holistic 3D structures that can be derived from city CAD models, e.g., corners, lines, wireframes, planes, and cuboids, with the ultimate goal of supporting real-world applications including city-scale reconstruction, localization, mapping, and augmented reality.